


Software de simulación 3D Pando - Centro de mando de escenario virtual

Mapeo de ejes 1:1: Refleja más de 256 servomotores en el espacio virtual
Prevención de colisiones:Detectar riesgos de interferencia antes de la carga
Vista previa artística:Visualice movimientos complejos con sincronización de iluminación y medios
| Método tradicional | Solución Pando 3D |
|---|---|
| Semanas de depuración in situ | ensayo virtual fuera de línea |
| Ajustes de prueba y error | Ejecución precisa a la primera |
| Previsualización limitada | Simulación de espectáculo en 3D completa |
El futuro de la programación de maquinaria escénica: del diseño virtual a la ejecución impecable
Gemelos digitales para el entretenimiento en vivo
Pando 3D es pionero en un flujo de trabajo innovador donde:
✅ Ejes virtuales espejo perfecto motores físicos (a través de EtherCAT/PLC)
✅ Control basado en objetos reemplaza la manipulación manual del motor
✅ Ciclo de vida completo del espectáculo Cobertura desde el diseño hasta el rendimiento
| Enfoque tradicional | Ventaja de Pando 3D |
|---|---|
| Control directo del motor | Manipulación de la forma de los objetos |
| Programación eje por eje | Ajustes preestablecidos de movimiento de grupo |
| Prueba y error físico | Validación virtual sin riesgos |
Características principales:
Sincronización física de más de 256 motores
Bibliotecas de movimientos preestablecidos (ondas, espirales, ascensores)
Herramientas de matriz/arreglo circular para aparejo rápido
Editor de línea de tiempo
Animación de fotogramas clave mediante arrastrar y soltar
Visualización de coordinación multieje
Detección automática de colisiones
Suite de depuración
Limite las alertas de exceso con corrección automática
Análisis de desviación de sincronización
Reducción del 90% en el tiempo de depuración in situ
Dispositivos compatibles:
Consolas de pantalla táctil (21,5" 1080P)
Tabletas y teléfonos inteligentes (iOS/Android)
Estaciones de trabajo de escritorio
Colaboración remota:
Intercambio de proyectos basado en la nube
Niveles de permisos para múltiples usuarios
Coedición en tiempo real
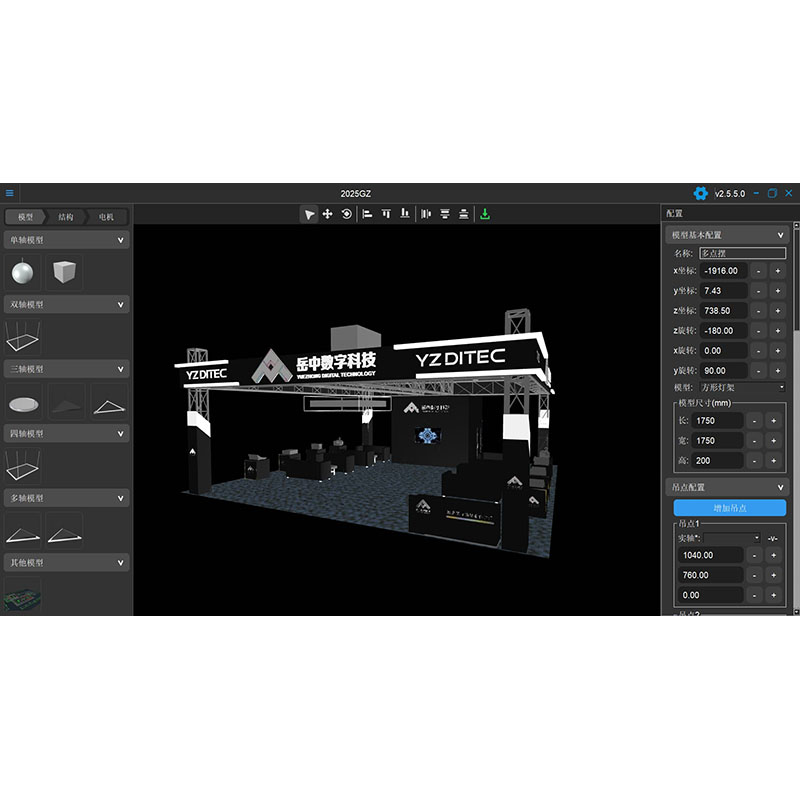
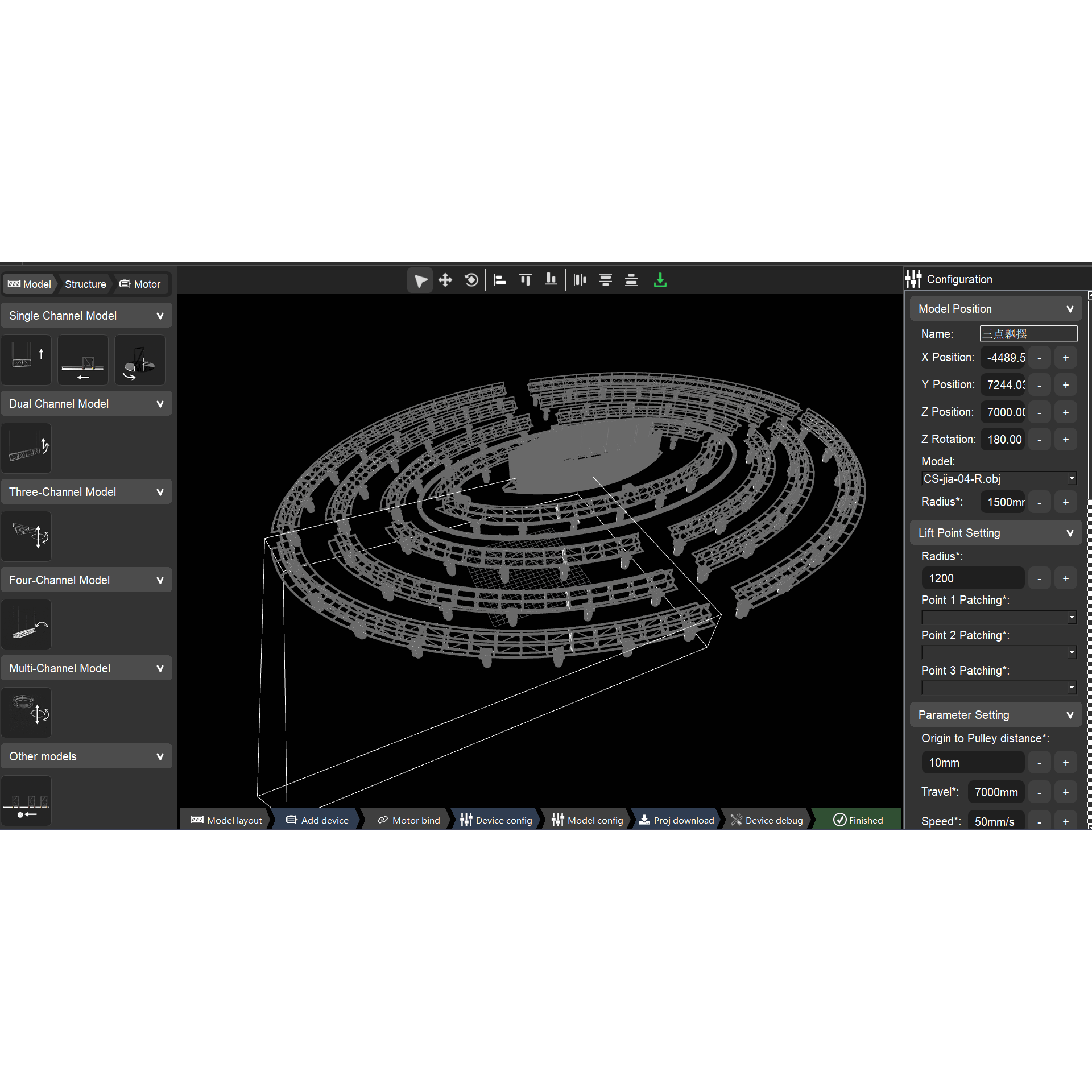
Plataforma de configuración

La plataforma de configuración es para construir el modo de construcción; construir el modo fácil o complicado es fácil aquí.
En esta ventana, puedes importar directamente modelos 3D prediseñados;
O puede arrastrar algún modo preestablecido, como ejes simples, ejes dobles, 3 ejes, 4 ejes.
Pasos siguientes:
1, arrastre el modo;
2, configuración del parámetro;
3. Haga coincidir el motor con cada eje.
4, guardar.
Configuración de parámetros:

En el menú "Estructura", puede configurar la relación maestro-esclavo del dispositivo.
Plataforma de depuración
(Acceso avanzado – Solo para personal autorizado)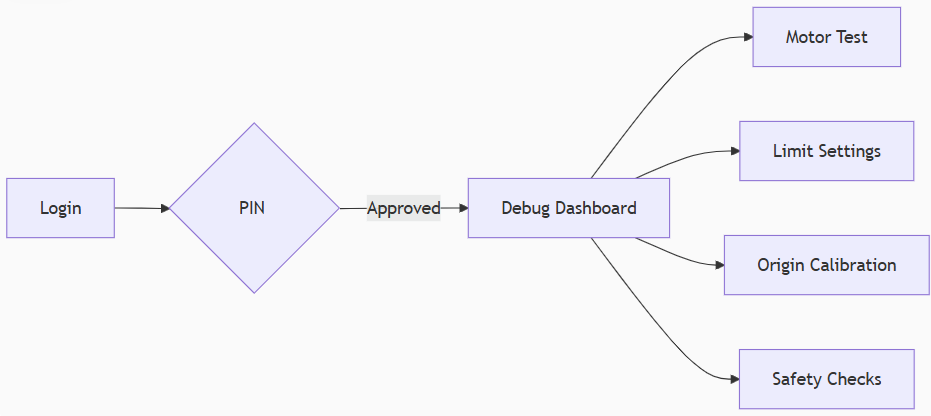
🔐 Modo restringido:Acceso de alto nivel solo para ingenieros de sistemas
⚙️ Funciones críticas:
Pruebas y calibración del motor
Configuración del interruptor de límite
Configuración del punto de origen
Validación del circuito de seguridad
✅ Control inalámbrico de múltiples dispositivos
Opere a través de teléfono inteligente/tableta/computadora con telemetría en tiempo real
Admite conectividad WiFi para trabajo de campo.
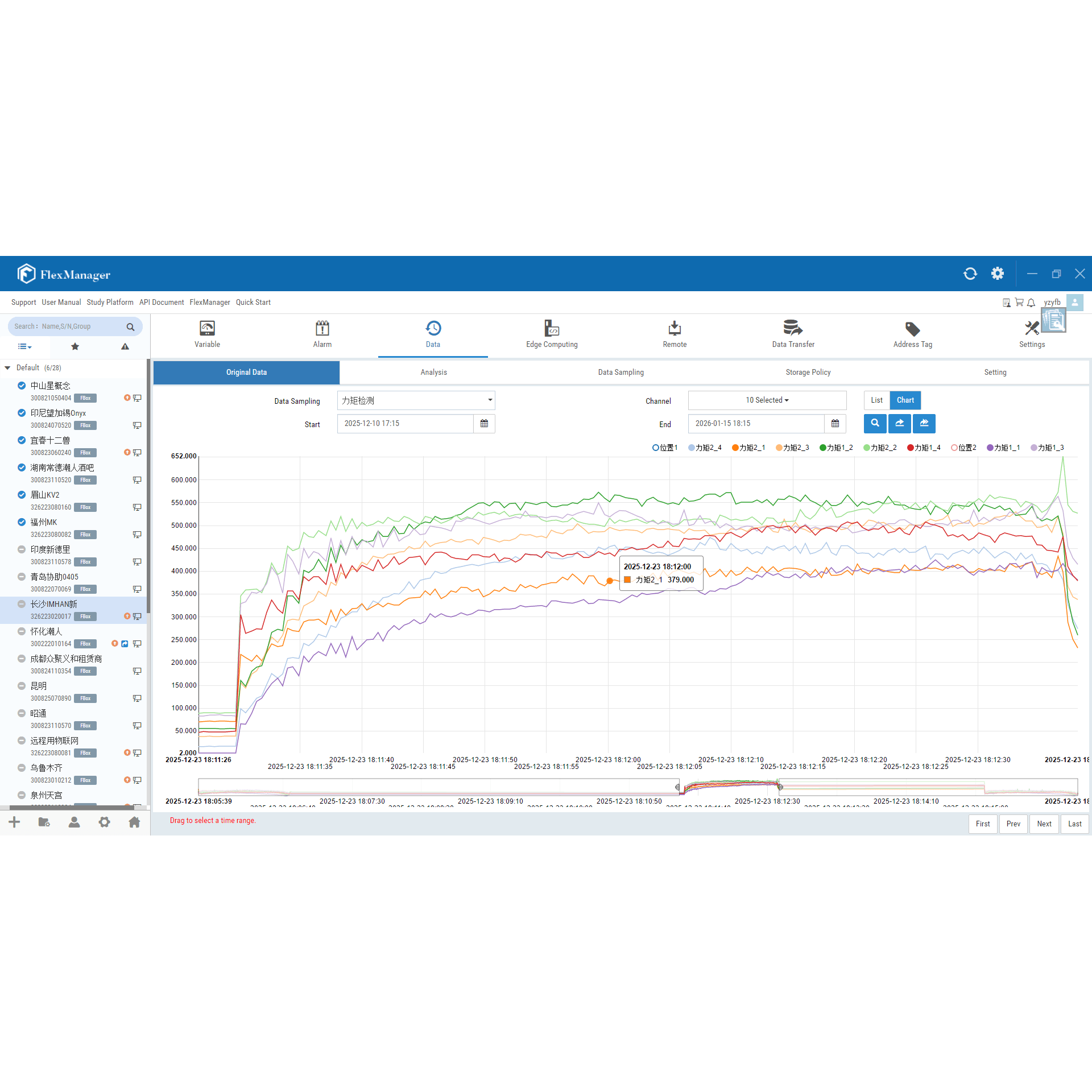
✅ Monitoreo del sistema en vivo
Visualización gráfica de:
Posición/velocidad/par del motor
Temperatura/voltaje/corriente
Estado de la red EtherCAT
✅ Alertas instantáneas de fallas
Notificaciones push a dispositivos móviles en:
Infracciones de límites
Fallos de comunicación
Condiciones de sobrecarga
🛑 Autenticación dual (Contraseña + Clave de hardware)
📊 Registro de auditoría:Registra todos los cambios de parámetros con marca de tiempo/ID de usuario
Plataforma de operaciones

Objetivo: Control directo del motor para configuración/prueba
Funciones:
Entrada directa de posición
Introduzca las coordenadas exactas (mm/°) para el movimiento de un solo eje
Retroalimentación de posición en tiempo real con una resolución de 0,1 mm
Recordatorio de la postura
Ejecutar posiciones previamente guardadas ("señales")
Admite 60 ajustes preestablecidos de postura
Diseño de movimiento basado en línea de tiempo:
Características:
Edición de fotogramas clave mediante arrastrar y soltar
Opciones de interpolación de curvas:
Lineal
Bézier (curva en S)
Función escalonada
Marcadores de sincronización multieje
| Canal DMX | Función |
|---|---|
| 1-16 | Selección de postura |
| 25-32 | Auto-Prog |
| Detener |
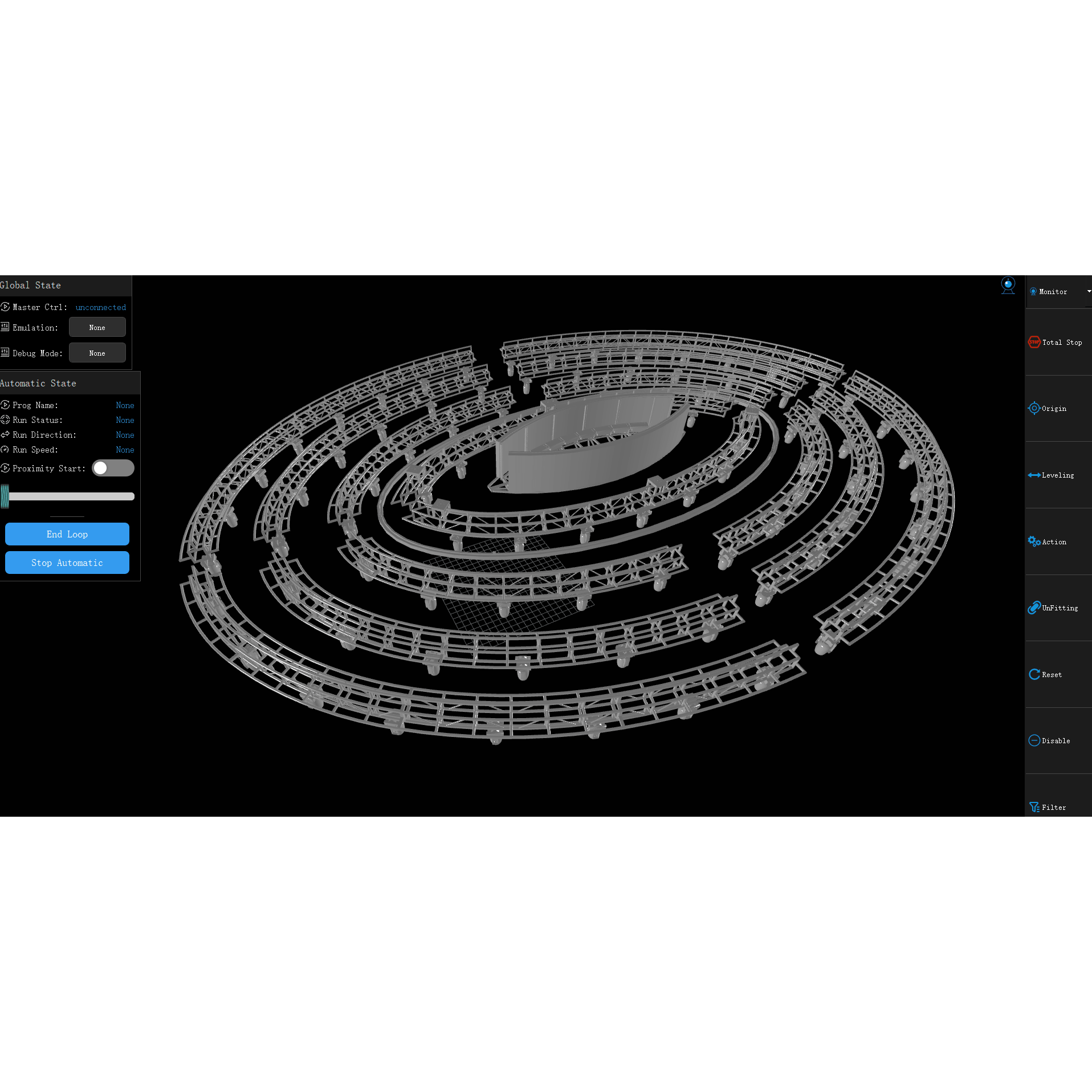
Vista 3D y datos en ejecución

Visualización sincronizada del estado de funcionamiento del modelo 3D que coincide con la maquinaria física
Monitorizar los parámetros clave del motor:
Posición
Velocidad
Relación de carga
Temperatura
Valor de peso
Códigos de alarma
Combine múltiples motores en controles virtuales simplificados:
Parámetros de elevación
Parámetros de inclinación
Parámetros de rotación
Agiliza el funcionamiento de sistemas mecánicos complejos
Habilitar "Protección del modelo" al guardar configuraciones
Análisis automático de trayectoria:
Detecta rutas de movimiento superpuestas o conflictivas
Garantiza el funcionamiento seguro del equipo.
Proporciona advertencias de seguridad antes de la ejecución.
Datos de motor virtuales y físicos mostrados uno al lado del otro
Monitoreo del rendimiento en tiempo real
Alertas automáticas de desviación
Ventajas técnicas
| Categoría | Especificación |
|---|---|
| Compatibilidad del sistema | Windows/Linux |
| Almacenamiento en la nube | Programas y modelos almacenados en una biblioteca mecánica estandarizada basada en la nube |
| Interfaz de configuración | - Configuración de la topología del bus del motor - Configuración de parámetros de movimiento/límite |
| Interfaz de programación | - Edición de movimiento preestablecida - Fotogramas clave de la línea de tiempo |
| Interfaz de operación | - Programación de movimiento - Reproducción de posturas - Posicionamiento absoluto - Monitoreo mecánico |
| Almacenamiento de acción | 360 movimientos estáticos + 360 movimientos dinámicos por proyecto |
| Capacidad de control | - 256 ejes máximo - 128 ejes en red de anillo |
| Compatibilidad con el controlador | 1 conexión del controlador principal |
| Precisión de la posición | 1 mm |
| Precisión horaria | 0,1 s |
| Soporte de idiomas | Chino/Inglés |

El Consola BW revoluciona la automatización del escenario como el primer terminal de control integrado combinatorio:Control de movimiento de grado industrial (precisión de 0,1 mm)Simulación 3D de Pando incorporada (flujo de trabajo de circuito cerrado de virtual a real)Arquitectura optimizada para el alquiler (implementación plug-and-play)Ventajas principales1. Sincronización virtual y real, "Depurar en 3D, ejecutar con confianza"Programación fuera de línea:Previsualizar escenas complejas en Pando 3DEnsayos virtuales:Pruebe señales sin mover maquinaria físicaAjuste en tiempo real:Los ajustes en el sitio se sincronizan automáticamente con la simulación2. Fiabilidad probadaCaracterísticaBeneficio técnicoParada de emergencia de modo dualCumple con EN 60204-1 Cat.0 (corte de energía) y Cat.1 (parada controlada)Comunicación por fibra ópticaTransmisión de señal sin interferencias de más de 2 km al controlador principal BW-MC™Integración DMX512Activación sin interrupciones desde consolas de iluminación (ArtNet/sACN opcional)
Detalles
Innovación fundamental: "Simula con confianza, ejecuta con precisión"Pando 3D revoluciona la automatización de escenarios como el primer sistema de control virtual totalmente integrado, transformando ejes servo físicos (polipastos/elevadores/platos giratorios) en elementos virtuales programables para una preproducción sin riesgos.Características principales1. Tecnología de gemelo digitalMapeo de ejes 1:1: Refleja más de 256 servomotores en el espacio virtualPrevención de colisiones:Detectar riesgos de interferencia antes de la cargaVista previa artística:Visualice movimientos complejos con sincronización de iluminación y medios2. Ventajas del flujo de trabajoMétodo tradicionalSolución Pando 3DSemanas de depuración in situensayo virtual fuera de líneaAjustes de prueba y errorEjecución precisa a la primeraPrevisualización limitadaSimulación de espectáculo en 3D completa
Detalles
El núcleo inteligente del sistema de automatización de escenarios Black WarriorDescripción general del sistemaDesarrollado por YZ DITEC, el BW-MC es el cerebro de control central Para maquinaria escénica profesional, combinando:✔ Control síncrono multieje (hasta 256 ejes)✔ Precisión submilimétrica (±0,5 mm de precisión de posicionamiento)✔ Arquitectura optimizada para el alquiler (modular y escalable)Características principales1. Control de movimiento avanzadoBasado en EtherCAT topología (frecuencia de actualización de 1 ms)Mapeo de ejes virtuales para trayectorias complejas2. Gestión inteligenteDiagnóstico de la salud motoraAlertas de umbral de temperatura/carga3. Ecosistema de seguridadTriple redundancia Circuitos de parada de emergencia (Cat. 0/1/2)Ajuste de límite dinámico durante la operación
Detalles
Controlador de movimiento de precisión para automatización de escenariosDescripción general del productoEl Controlador de accionamiento BW-DC es una unidad de control de movimiento de alto rendimiento de la Sistema del Guerrero NegroDiseñado por YZ DITEC para maquinaria escénica profesional. Diseñado para funcionar con... Controlador principal del servo BW-MC (procesador central de automatización de etapas), ofrece:Control de precisión multieje para servo polipastos/cabrestantesDespliegue rápido y configuraciones escalables para los mercados de alquilerMonitoreo en tiempo real del servomotor con codificador absolutoCaracterísticas principalesActuaciónSeguridad y control✔ Diseño flexible:Controla múltiples unidades de ejecución con movimiento sincronizado✔ Seguridad de triple capa:Combina protecciones de hardware, software y controlador principal✔ Alta precisión:Precisión de posicionamiento submilimétrica para una automatización fluida✔ Módulo de seguridad incorporado: Protección contra sobrecarga, control de freno doble, detección de límite✔ Datos en tiempo real:Retroalimentación continua sobre la posición, la velocidad y el par del motor.✔ Configuración del panel:Configuración de parámetros del motor local y monitorización del estado
Detalles
Gestión de energía robusta para sistemas de automatización Black Warrior1. Distribución de energía de calidad profesionalGestión de carga equilibrada: Previene el desequilibrio de faseDiseño en cascada: Ampliable para grandes instalaciones2. Mayor seguridadProtección de doble nivel:Disyuntores térmicos magnéticosInterruptores de corte de emergenciaIndicadores visuales:LED de estado de fase3. Construcción lista para la giraOpción de estuche de vuelo:Acolchado de espuma de 50 mmConectores con clasificación IP54
Detalles
 Tel : +86 13714472831
Tel : +86 13714472831 Email : ysstagetech@gmail.com
Email : ysstagetech@gmail.com No18, Wenchang road, Hailong street, Liwan district, Guangzhou, China
No18, Wenchang road, Hailong street, Liwan district, Guangzhou, China




 IPv6 RED SOPORTADA
Blog
| Mapa del sitio
| XML
| política de privacidad
IPv6 RED SOPORTADA
Blog
| Mapa del sitio
| XML
| política de privacidad
 español
español English
English русский
русский 한국의
한국의 العربية
العربية
